Introducción del proyecto
El proyecto tenia un fin, que sea autónomo y a su vez funcione de manera adecuada en un pista hecha por nosotros. El proyecto tuvo una duración aproximada de 2 meses, entre su explicación, elaboración y demostración, lo que primero se hizo fue la elaboración del chasis , luego las conexiones entre el arduino, protoboard, puente H, motoreductores y sensores y finalmente la elaboración de la pistas y mejoraron de su aspecto estético.
Materiales empleados
DestornilladoresCables macho-hembra
Puentes H
Resistencias
Cinta aislante negra
Fondo blanco
Marcadores
Chasis
1 arduino 2 motoreductores
2 llantas
Cables macho-macho
2 baterías de 9v
Sensor CNY70
Dificultades la momento de la construcción
Pues lo mas complejo fue conectar los 2 sensores al Arduino, ya que había que conectarlo de una manera precisa, la programación no fue un impedimento ya que esta fue realizada por el profesor, quitando el momento en le que se nos robaron el primer prototipo, no hubo ninguna otra dificultad
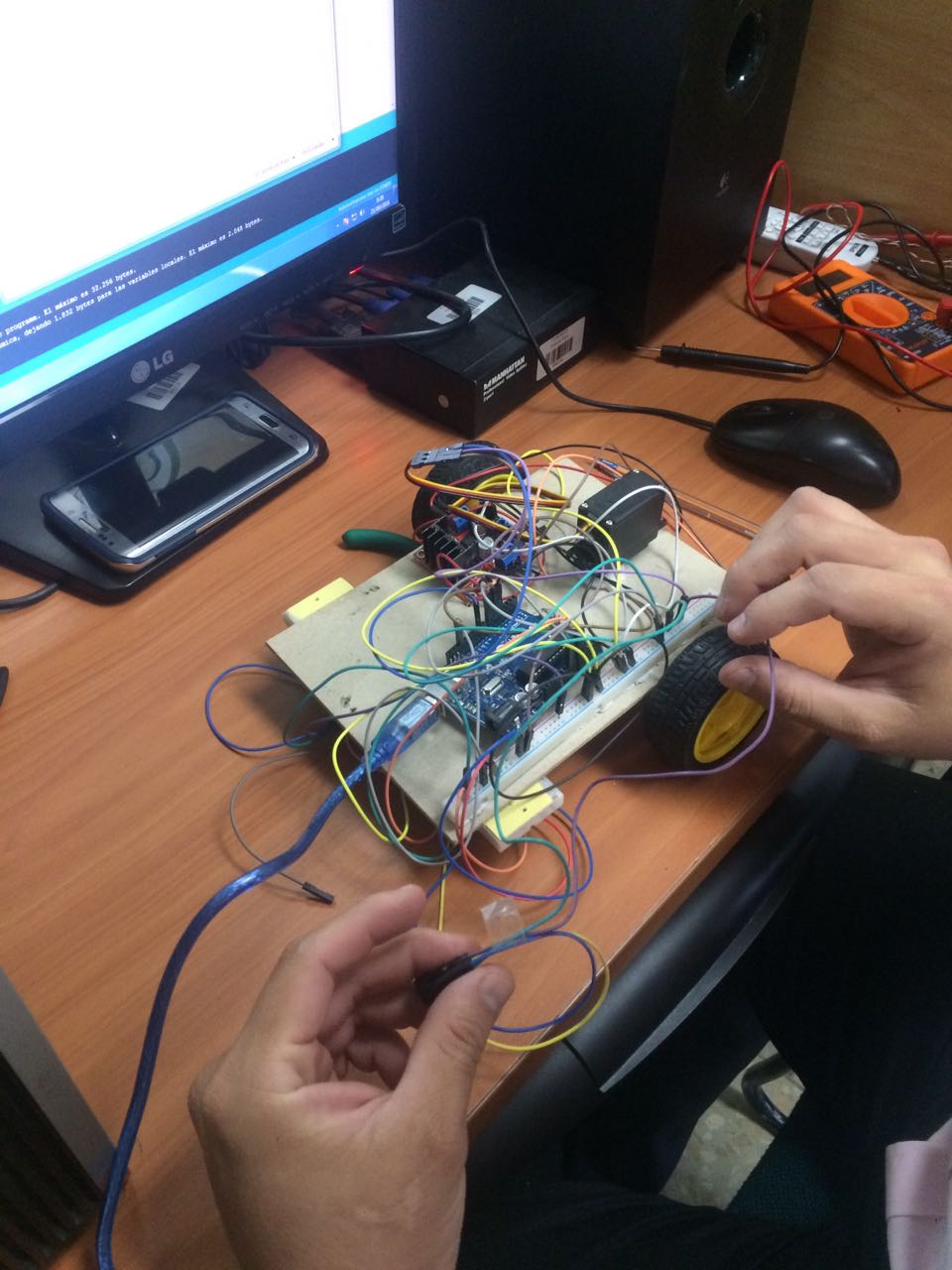
Evidencias














Conclusión
El proyecto funciono como se esperaba, pero lamentablemente antes de la presentación uno de los motoreductores se averio, pero el proyecto logro ser un éxito a pesar de las dificultades que se presentaron en el camino el proyecto logro un buen resultado, ya que el sensor CNY70 si identificaba bien los colores (blanco y negro)